Introduzione alla minimizzazione di funzioni
Il problema di minimizzare (equivalente in modo banale, cambiando il
segno, a massimizzare) una funzione reale di una o
più variabili reali è estremamente importante in
fisica.
- in meccanica, le posizioni di equilibrio stabile di un sistema
conservativo corrispondono ai minimi locali dell' energia potenziale.
La loro conoscenza è fondamentale non solo per
identificare le posizioni di equilibrio (e determinare p.es. distanze
di legame in molecole, strutture cristalline di solidi,
proprietà di
solidi amorfi,...) ma anche per poter procedere con l' analisi del moto
attorno alle posizioni di equilibrio (modi normali di vibrazione);
- gran parte della Meccanica Classica, Quantistica e Teoria
Quantistica dei Campi può essere riscritta in termini di
principi variazionali, parte dei quali sono principi di minimo;
- le procedure di analisi statistica dei dati sperimentali
richiedono spesso di minimizzare funzioni;
- molti diversi settori applicativi (dall' ottica dei raggi a
problemi di ottimizzazione in econofisica) presentano problemi
più o meno complessi di ottimizzazione.
Questo estremo interesse in Fisica per metodi di minimizzazione ha
anche portato a ibridazioni estremamente fruttuose tra matematica
numerica e fisica. In più di un' occasione, nuovi metodi di
ottimizzazione sono stati proposti a partire da analogie o sfruttando
proprietà dei sistemi fisici.
Una prima distinzione tra problemi di minimo riguarda i problemi di
minimo globale e locale.
Ricordiamo che un punto xmin
del
dominio D di una funzione si
dice punto di minimo assoluto/globale se
f(xmin) ≤ f(x) ∀
x ∈ D
[1]
mentre è un minimo relativo se la disuguaglianza vale solo per
un
intorno di xmin appartenente a D.
Il problema di determnare in modo efficiente numero e posizione dei
punti di minimo globale costituisce uno dei problemi più
complessi dell' analisi numerica ed è tuttora un argomento di
ricerca attiva.
Il problema di determinare un minimo relativo (locale) è
invece meglio compreso ed esistono numerosi algoritmi
sufficientemente rodati ed analizzati.
In queste note non toccheremo gli algoritmi moderni per la
minimizzazione di funzioni di più variabili (gradienti
coniugati, metodi quasi-newton) ma ci limiteremo a discutere il
metodo dello Steepest-Descent,
noto per essere altamente inefficiente nel caso di problemi mal
condizionati con funzioni di più variabili (vedi dopo per
la definizione di problema di minimo mal condizionato), e tuttavia, per
la sua semplicità, può costituire un punto di
partenza per la
soluzione numerica di problemi di bassa dimensionalità. Inoltre
permette di discutere in modo semplice l' origine delle
difficoltà in più di una dimensione dando anche la
possibilità di avere una prima idea su cosa possa voler
dire un approccio "da fisici" al problema della minimizzzione.
Metodo dello Steepest-Descent a passo
fisso
Supponiamo di essere in grado di calcolare la derivata (o
tutte le derivate parziali, per funzioni di n variabili) della
funzione di cui cerchiamo il minimo, per tutti i punti del suo
dominio.
Iniziamo col caso di funzioni
di una variabile. Se vediamo
la funzione da minimizzare come una funzione energia potenziale
u(x), e la ricerca del minimo come la ricerca del punto di
equilibrio stabile, la soluzione del problema può
esserci suggerita dal comportamento di sistemi fisici con
attrito dipendente dalla velocità, in regime di
sovrasmorzamento: la dinamica è ben approssimata da
equazioni del moto del tipo
v = w F
dove v è la velocità, w una costante positiva e F= -du/dx la forza. Dove la
forza è maggiore lì il sistema si muove
più velocemente, mentre, dove la forza si annulla abbiamo
un punto di equilibrio del sistema. Discretizzando l' equazione
differenziale per x(t), risulta evidente che, secondo
questa "dinamica smorzata" un punto di minimo del
potenziale corrisponde al punto fisso della
trasfomazione
x(n+1) =
x(n) + α F(x(n))
[2]
dipendente dal parametro α.
La teoria sui punti fissi di trasformazioni del tipo
[2] ci dice che in un intorno del punto di equilibrio
esisterà un valore di α > 0 sufficienteente piccolo
da garantire la converenza dell' algoritmo al punto di
minimo. Inoltre, il valore critico di α al di sopra del quale l'
algoritmo cessa di convergere, sarà tanto più
piccolo quanto maggiore la curvatura (la deivata seconda) del
potenziale al minimo.
Caso con n variabili.
Con una funzione di più variabili
u(x1,x2,...,xN) le idee sopra
esposte possono essere riutilzzate direttamente per arrivare ad un
algoritmo (lo Steepest-Descent a passo fisso) che
è la generalizzazione diretta della trasformazione [2]:
xi(n+1)
= xi(n) + α Fi(x1(n),x2(n),...,xN(n))
[3]
L' analisi della trasformazione [3] è semplificata dall'
osservazione che in un intorno del minimo (m1,m2,...,mN)
le "forze" che appaiono nellla [3] hanno una struttura semplice.
Infatti la funzione da minimizzare (potenziale) può
essere espansa in serie di Taylor di più variabili :
u(x1,x2,...,xN)
= u(m1,m2,...,mN)
+ ∑i,jHij(xi-mi) (xj-mij)
[4]
dove la matrice Hij = [(1/2)∂2u/∂xi∂xj
] è una matrice simmetrica, definita positiva.
Pertanto diagonalizzabile. Nella base degli autovettori di H, nell'
intorno del minimo, le [3] possono essere riscritte come N
equazioni disaccoppiate del tipo [2], per ciascuna delle variabili
xi.
Questa osservazione dà una prima idea di quali possano essere i
problemi per cui l' algritmo risulti poco efficiente: basta che un solo
autovettore di H corrisponda ad un autovalore molto maggiore degli
altri, perché questo limiti il valore massimo del
parametro α per tutti i gradi di libertà.
Inoltre, in queste condizioni, corrispondenti ad una buca di potenziale
molto asimmetrica attorno al punto di minimo, c'è un
ulteriore limite dell' algoritmo che interviene a renderlo poco
efficiente. Illustriamo la situazione in 2D per semplicità
di visualizzazione, anche se l' argomento è di
validità generale.
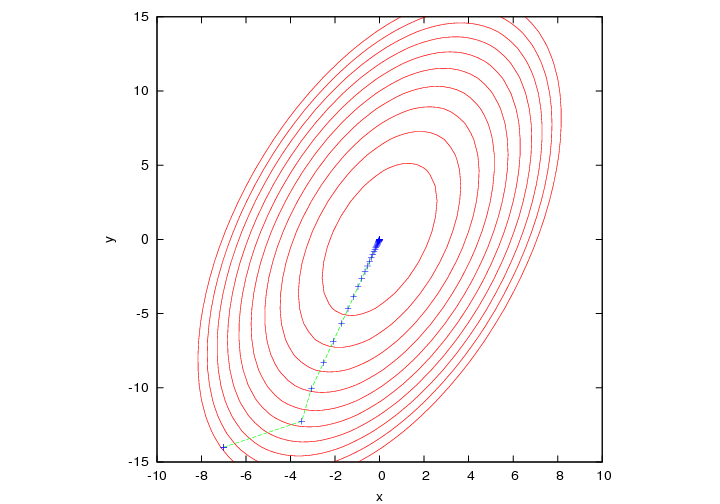
Nell' intorno del minimo le curve di livello corrispondenti ad un
valore costante del potenziale costituiscono una famiglia di ellissi
concentriche al punto di minimo e la cui eccentricità
dipende dal mal condizionamento del problema, quantificato dal numero
di condizionamento della matrice H. Ricordiamo che il numero di
condizionamento di una matrice diagonalizzabile corrisponde al rapporto
tra massimo e minimo autovalore.
Grandi differenze tra gli autovalori (positivi) di H corrispondono ad
una "valle" attorno al minimo molto "allungata" in una direzione.
La trasformazione [3] corrisponde a far muovere il
punto rappresentativo del sistema lungo la direzione della forza nel
punto di partenza.
Il vettore forza è (a parte il segno) il gradiente della
superficie di energia potenziale. Si può far vedere che il
gradiente in un punto di una funzione u(x1,x2,...,xN)
è sempre ortogonale alla curva di livello che passa per
quel punto1. Pertanto la successione delle trasformazioni
[3] corrisponde ad una spezzata in cui ogni segmento deve essere
ortogonale alla curva di livello su cui termina. Questo, come
esemplificato nella figura,
può rendere estremamente lenta la convergenza al minimo e quindi
dar conto delle difficoltà del metodo (anche se non
apprezzabile sula scala dela figura, segmenti successivi
tendono ad allinearsi con l' asse maggiore delle ellisse ma non
conicindono mai con questo).
Le croci evidenziano i punti successivi ottenuti nella
ricerca del minimo mediante Steepest-Descent a passo
fisso.
1 Una curva di livello è caratterizzata dalla
condizione u(x,y) = costante. Il differenziale di questa funzione
sarà
du=∂u/∂x dx + ∂u/∂y dy = 0. Questa condizione può essere
interpretata come la condizione di ortogonalità tra il vettore
gradiente (∂u/∂x , ∂u/∂y) e il vettore tangente alla curva di livello:
(dx , dy).